
After halves presentation, we got valuable feedback from different guests and discussed about our future tasks accordingly. We realized that we are little behind the previous schedule, so we prioritized our tasks and made a detailed plan for the following weeks.
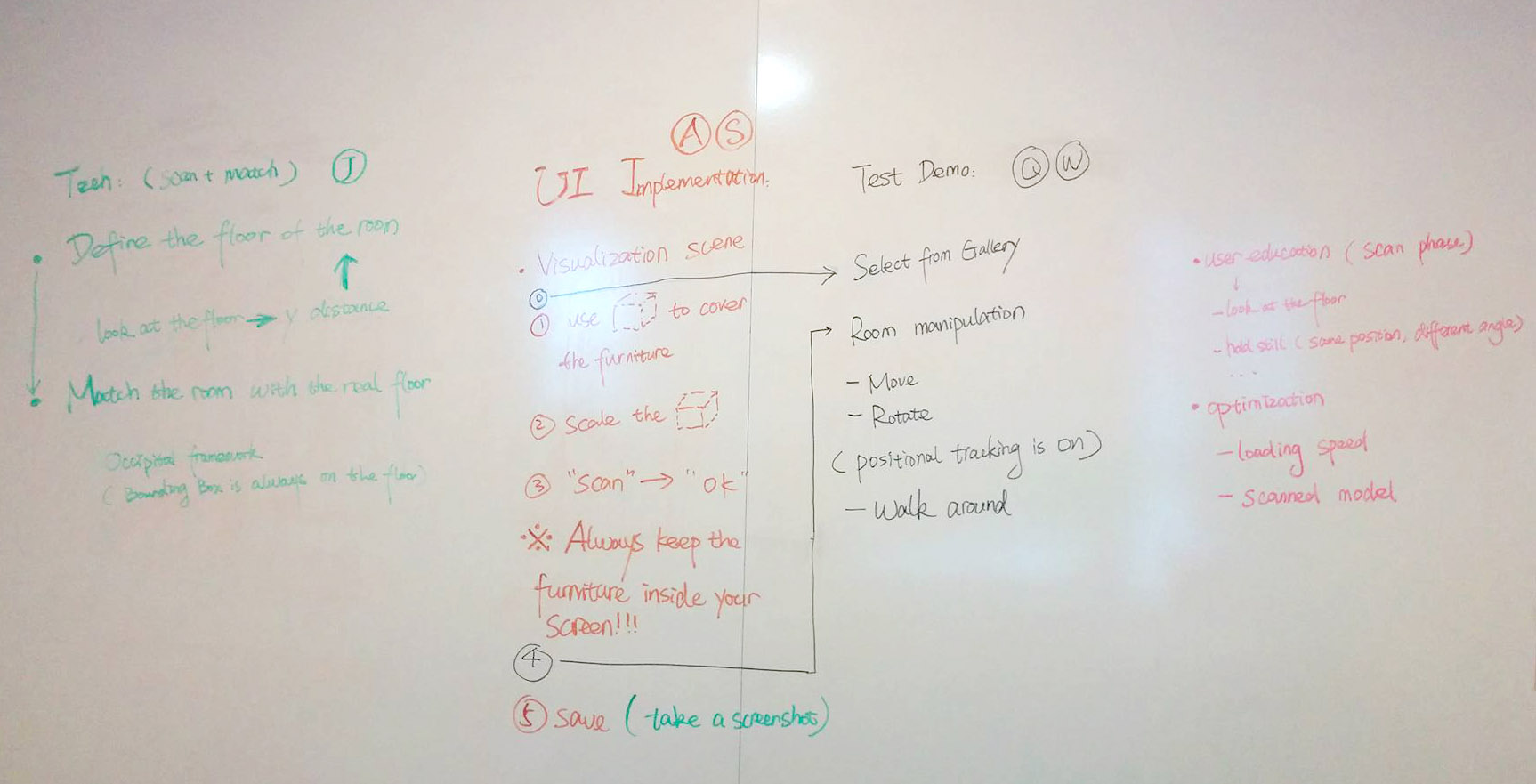
Jack will be mainly focusing on our last main feature – floor matching.
There are two steps to achieve the goal:
1. Figure out the floor of the room model;
2. Match the room model with the real floor.
Our biggest challenge is the first step, because for the second step we can refer to Occipital’s framework which matches the bounding box with the real floor.
For the first step, we basically have two options to solve the problem:
1. Let the user define the floor during scanning phase;
2. We automatically calculate the lowest the plain of the model and define it as the floor.
After discussing within the team and with our advisors, we finally chose to go with the second approach since it’s more user-friendly.
Sophia, Atit and Wei are going to work together to implement UI for our existing scenes: main menu, scan phase and part of the visualize phase.
Wei and Sophia has drew out a UI/UX flow with detailed interfaces. Later sophia is going to create UI elements (icons, buttons) for Atit to implement to the build.
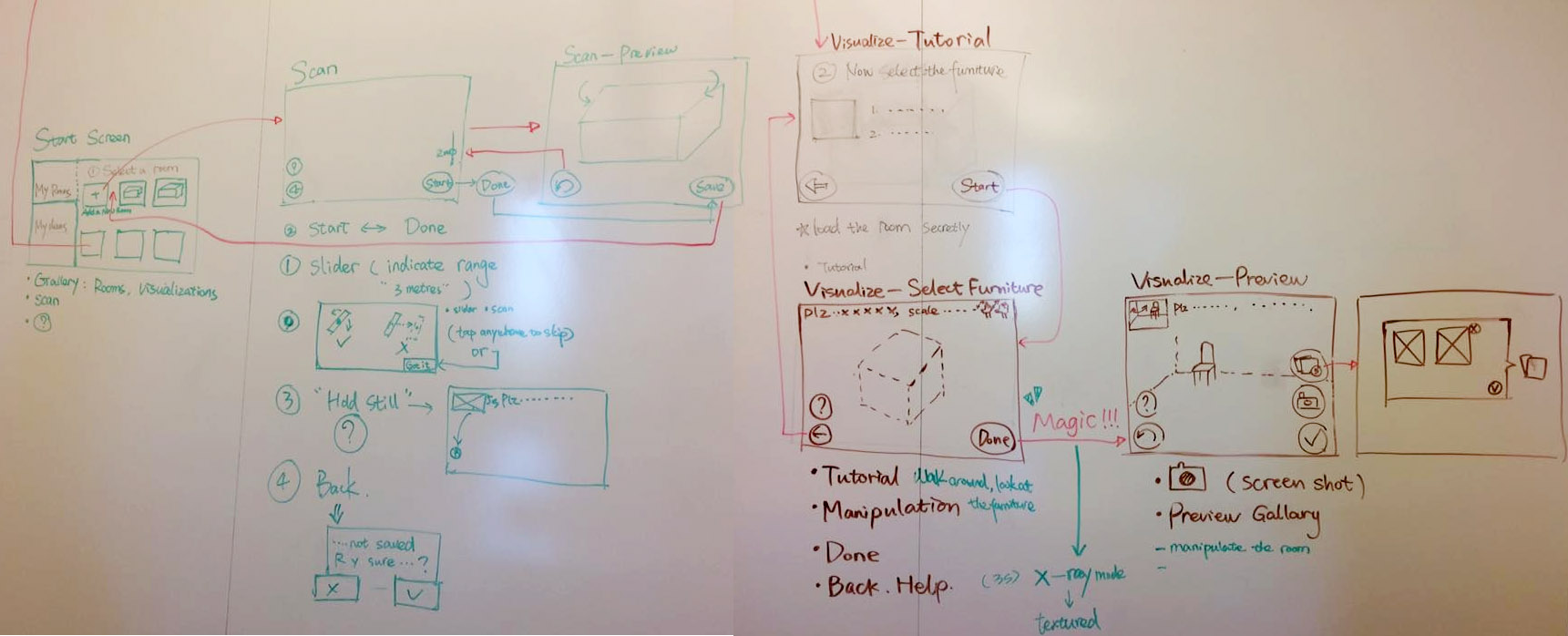
Qing and Wei are going to work on test demos to figure out the interaction design before we implement it. For example, we haven’t implemented room alignment function yet, but we could build a separate 3D room manipulation demo to test the interaction beforehand. By doing so, we could save our development time and ensure the quality of the product as well.