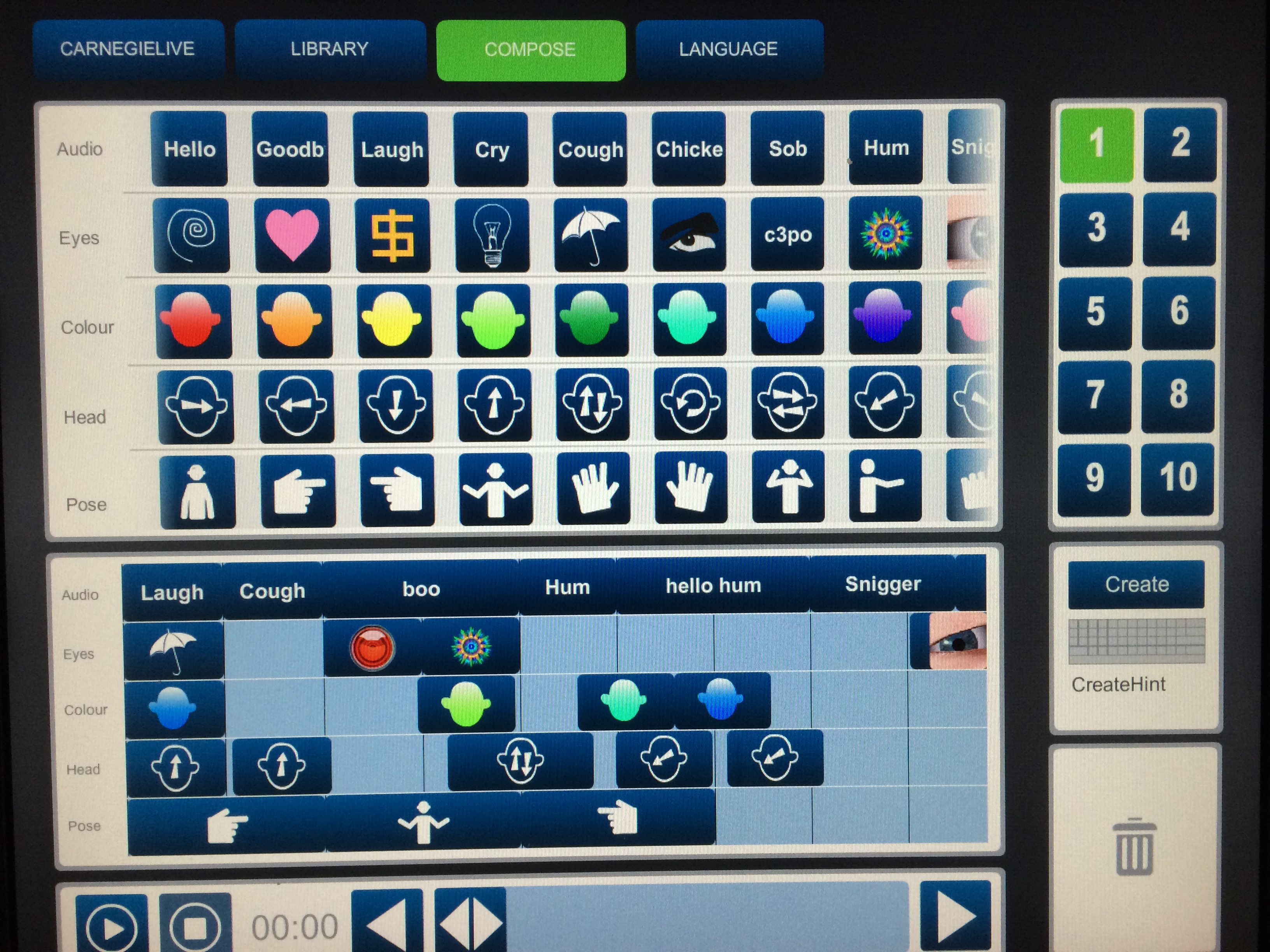
Over this semester we have been doing a good amount of research on concepts and user interfaces that can helps us to create a better final product. Our idea is to create a flexible, dynamic and intuitive interface that exports animations to HERB. The interface we are trying to develop is something that gives the the operator the possibility of composing before the play as well as tweaking those actions in real time.
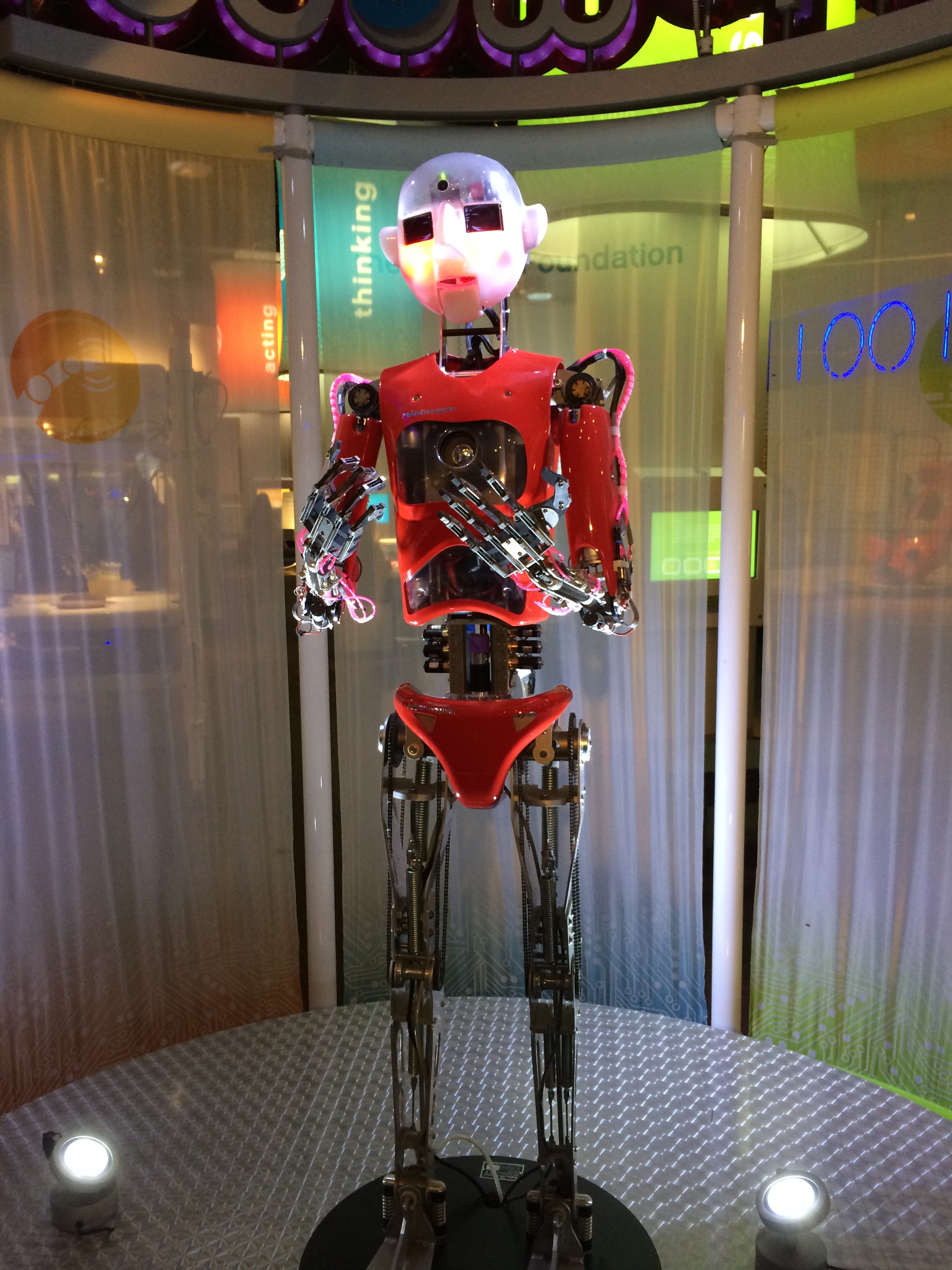
There are several projects with similar concepts in terms of robot manipulation and one of those projects is located at the Carnegie Science Center, in Downtown Pittsburgh.
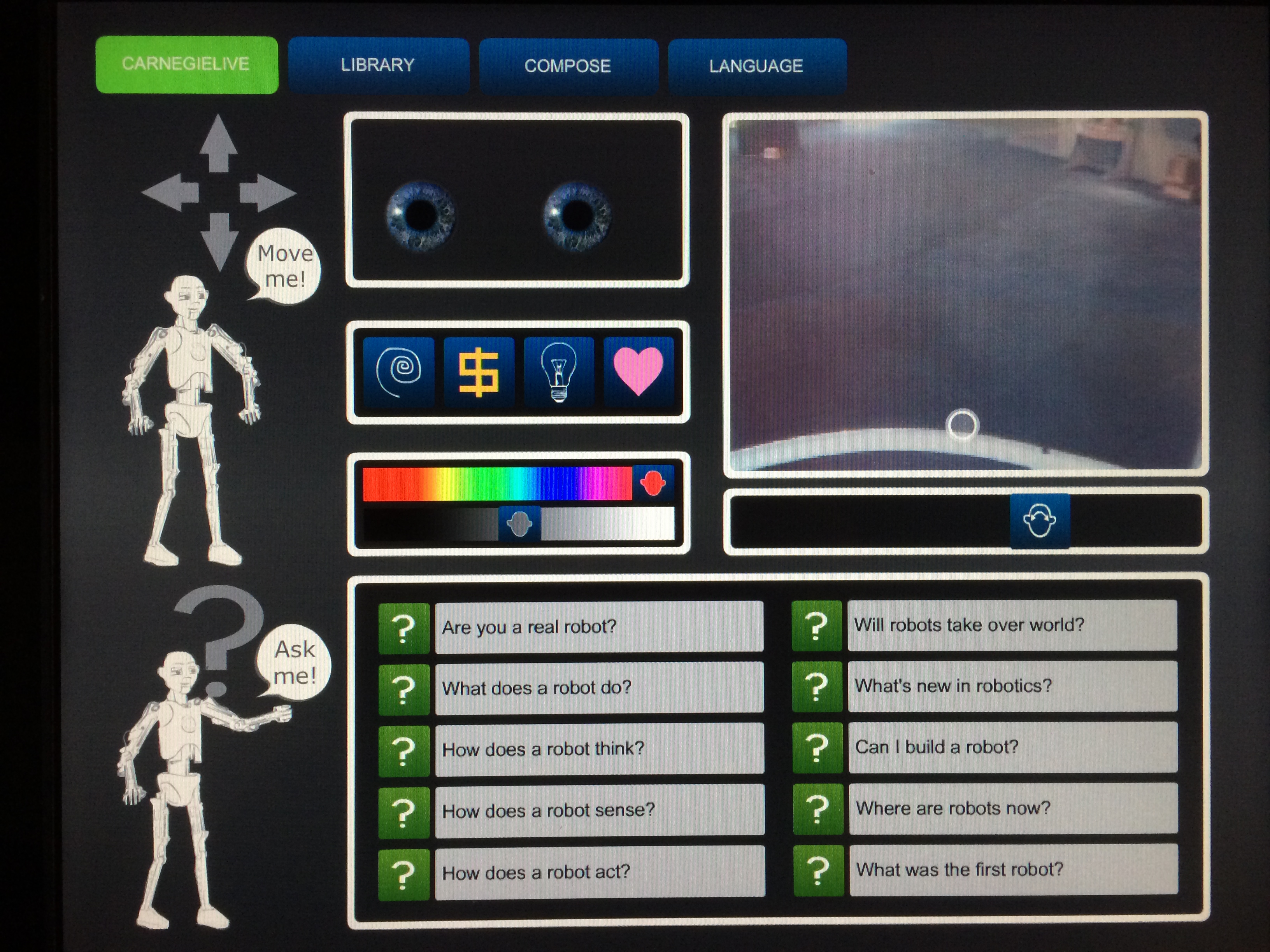
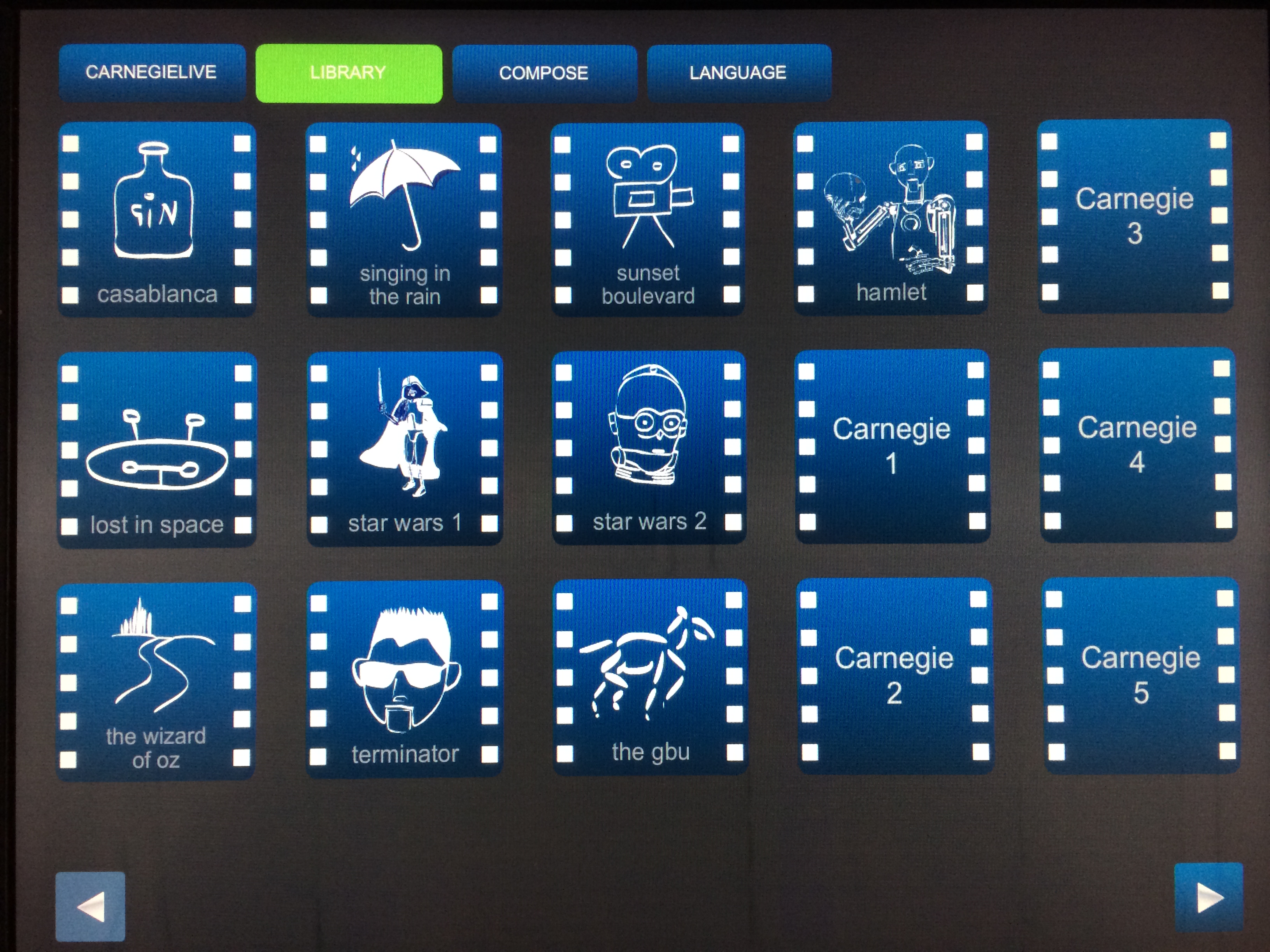
A couple of weeks ago we had the opportunity to visit this installation and got some valuable insights about the interface and the setup of this interesting robot. Below there are some pictures we took in our visit.